Cartesian velocity motion with a single target velocity. More...
#include <cartesian_velocity_motion.hpp>
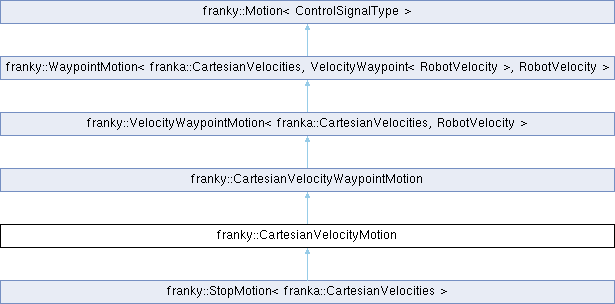
Inheritance diagram for franky::CartesianVelocityMotion:
Public Member Functions | |
| CartesianVelocityMotion (const RobotVelocity &target, const franka::Duration &duration=franka::Duration(1000), const RelativeDynamicsFactor &relative_dynamics_factor=1.0, const Affine &frame=Affine::Identity()) | |
| Construct a Cartesian motion. | |
 Public Member Functions inherited from franky::CartesianVelocityWaypointMotion Public Member Functions inherited from franky::CartesianVelocityWaypointMotion | |
| CartesianVelocityWaypointMotion (const std::vector< VelocityWaypoint< RobotVelocity > > &waypoints, const RelativeDynamicsFactor &relative_dynamics_factor=1.0, Affine ee_frame=Affine::Identity()) | |
| const Affine & | ee_frame () const |
| Public Member Functions inherited from franky::VelocityWaypointMotion< franka::CartesianVelocities, RobotVelocity > | |
| VelocityWaypointMotion (std::vector< VelocityWaypoint< RobotVelocity > > waypoints, const RelativeDynamicsFactor &relative_dynamics_factor=1.0) | |
| const RelativeDynamicsFactor & | relative_dynamics_factor () const |
| Public Member Functions inherited from franky::WaypointMotion< ControlSignalType, WaypointType, TargetType > | |
| WaypointMotion (std::vector< WaypointType > waypoints, bool return_when_finished=true) | |
| const std::vector< WaypointType > & | waypoints () const |
| bool | return_when_finished () const |
| Public Member Functions inherited from franky::Motion< ControlSignalType > | |
| virtual | ~Motion ()=default |
| void | addReaction (std::shared_ptr< Reaction< ControlSignalType > > reaction) |
| Add a reaction to the motion. | |
| void | addReactionFront (std::shared_ptr< Reaction< ControlSignalType > > reaction) |
| Add a reaction to the front of the reaction list. | |
| std::vector< std::shared_ptr< Reaction< ControlSignalType > > > | reactions () |
| Currently registered reactions of the motion. | |
| void | registerCallback (CallbackType callback) |
| Register a callback that is called in every step of the motion. | |
| void | init (Robot *robot, const RobotState &robot_state, const std::optional< ControlSignalType > &previous_command) |
| Initialize the motion. Motions can only be started once; this function throws a MotionReuseException on any subsequent call. | |
| bool | has_started () const |
| Whether this motion has already been started. Started motions cannot be started again. | |
| ControlSignalType | nextCommand (const RobotState &robot_state, franka::Duration time_step, franka::Duration rel_time, franka::Duration abs_time, const std::optional< ControlSignalType > &previous_command) |
| Get the next command of the motion. | |
| std::shared_ptr< Motion< ControlSignalType > > | checkAndCallReactions (const RobotState &robot_state, franka::Duration rel_time, franka::Duration abs_time) |
| Check and call reactions. | |
Detailed Description
Cartesian velocity motion with a single target velocity.
Constructor & Destructor Documentation
◆ CartesianVelocityMotion()
|
explicit |
Construct a Cartesian motion.
- Parameters
-
target The target Cartesian velocity. duration Duration this command is active. Default is 1s. relative_dynamics_factor The relative dynamics factor for this motion. The factor will get multiplied with the robot's global dynamics factor to get the actual dynamics factor for this motion. frame The end-effector frame for which the target is defined. This is a transformation from the configured end-effector frame to the end-effector frame the target is defined for.
The documentation for this class was generated from the following files:
- /home/runner/work/franky/franky/include/franky/motion/cartesian_velocity_motion.hpp
- /home/runner/work/franky/franky/src/motion/cartesian_velocity_motion.cpp