|
| | CartesianMotion (const CartesianState &target, ReferenceType reference_type=ReferenceType::kAbsolute, const RelativeDynamicsFactor &relative_dynamics_factor=1.0, bool return_when_finished=true, const Affine &frame=Affine::Identity()) |
| | Construct a Cartesian motion.
|
| |
| | CartesianWaypointMotion (const std::vector< PositionWaypoint< CartesianState > > &waypoints, const RelativeDynamicsFactor &relative_dynamics_factor=1.0, bool return_when_finished=true, Affine ee_frame=Affine::Identity()) |
| |
| const Affine & | ee_frame () const |
| |
| | PositionWaypointMotion (std::vector< PositionWaypoint< CartesianState > > waypoints, const RelativeDynamicsFactor &relative_dynamics_factor=1.0, bool return_when_finished=true) |
| |
| const RelativeDynamicsFactor & | relative_dynamics_factor () const |
| |
| | WaypointMotion (std::vector< WaypointType > waypoints, bool return_when_finished=true) |
| |
| const std::vector< WaypointType > & | waypoints () const |
| |
| bool | return_when_finished () const |
| |
| virtual | ~Motion ()=default |
| |
| void | addReaction (std::shared_ptr< Reaction< ControlSignalType > > reaction) |
| | Add a reaction to the motion.
|
| |
| void | addReactionFront (std::shared_ptr< Reaction< ControlSignalType > > reaction) |
| | Add a reaction to the front of the reaction list.
|
| |
| std::vector< std::shared_ptr< Reaction< ControlSignalType > > > | reactions () |
| | Currently registered reactions of the motion.
|
| |
| void | registerCallback (CallbackType callback) |
| | Register a callback that is called in every step of the motion.
|
| |
| void | init (Robot *robot, const RobotState &robot_state, const std::optional< ControlSignalType > &previous_command) |
| | Initialize the motion. Motions can only be started once; this function throws a MotionReuseException on any subsequent call.
|
| |
| bool | has_started () const |
| | Whether this motion has already been started. Started motions cannot be started again.
|
| |
| ControlSignalType | nextCommand (const RobotState &robot_state, franka::Duration time_step, franka::Duration rel_time, franka::Duration abs_time, const std::optional< ControlSignalType > &previous_command) |
| | Get the next command of the motion.
|
| |
| std::shared_ptr< Motion< ControlSignalType > > | checkAndCallReactions (const RobotState &robot_state, franka::Duration rel_time, franka::Duration abs_time) |
| | Check and call reactions.
|
| |
|
| using | CallbackType = std::function< void(const RobotState &, franka::Duration, franka::Duration, franka::Duration, const ControlSignalType &)> |
| |
| void | initWaypointMotion (const RobotState &robot_state, const std::optional< franka::CartesianPose > &previous_command, ruckig::InputParameter< 7 > &input_parameter) override |
| |
| void | setNewWaypoint (const RobotState &robot_state, const std::optional< franka::CartesianPose > &previous_command, const PositionWaypoint< CartesianState > &new_waypoint, ruckig::InputParameter< 7 > &input_parameter) override |
| |
| std::tuple< Vector7d, Vector7d, Vector7d > | getAbsoluteInputLimits () const override |
| |
| franka::CartesianPose | getControlSignal (const RobotState &robot_state, const franka::Duration &time_step, const std::optional< franka::CartesianPose > &previous_command, const ruckig::InputParameter< 7 > &input_parameter) override |
| |
| std::tuple< Vector7d, Vector7d, Vector7d > | getDesiredState (const RobotState &robot_state) const override |
| |
| void | setInputLimits (const PositionWaypoint< CartesianState > &waypoint, ruckig::InputParameter< 7 > &input_parameter) const override |
| |
| void | extrapolateMotion (const RobotState &robot_state, const franka::Duration &time_step, const ruckig::InputParameter< 7 > &input_parameter, ruckig::OutputParameter< 7 > &output_parameter) const override |
| |
| void | initImpl (const RobotState &robot_state, const std::optional< ControlSignalType > &previous_command) override |
| |
| ControlSignalType | nextCommandImpl (const RobotState &robot_state, franka::Duration time_step, franka::Duration rel_time, franka::Duration abs_time, const std::optional< ControlSignalType > &previous_command) override |
| |
| virtual void | initWaypointMotion (const RobotState &robot_state, const std::optional< ControlSignalType > &previous_command, ruckig::InputParameter< 7 > &input_parameter)=0 |
| |
| virtual void | setNewWaypoint (const RobotState &robot_state, const std::optional< ControlSignalType > &previous_command, const WaypointType &new_waypoint, ruckig::InputParameter< 7 > &input_parameter)=0 |
| |
| virtual void | checkWaypoint (const WaypointType &waypoint) const |
| |
| virtual ControlSignalType | getControlSignal (const RobotState &robot_state, const franka::Duration &time_step, const std::optional< ControlSignalType > &previous_command, const ruckig::InputParameter< 7 > &input_parameter)=0 |
| |
| virtual void | setInputLimits (const WaypointType &waypoint, ruckig::InputParameter< 7 > &input_parameter) const =0 |
| |
| | Motion () |
| |
| Robot * | robot () const |
| |
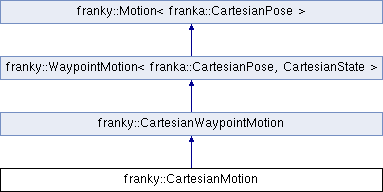
Cartesian motion with a single target.
 Public Member Functions inherited from
Public Member Functions inherited from